
Open Source
Knuckle
On Github: Example Knuckle
This example is the extension from the meshing tutorial for the knuckle that's available at the coreform forum.
This means we will first get the geometry from the forum and run the journal to have our starting point.
reset
import acis "path/to/knuckle.sat" nofreesurfaces heal attributes_on separate_bodies ## Assign sets
block 1 vol 1
block 1 name "knuckle"
block 1 element type hex8## Defeature
remove surface 17 extend
remove surface 15 extend## Partion for meshing
webcut volume 1 with plane normal to curve 29 close_to vertex 28
webcut volume 1 with plane normal to curve 35 close_to vertex 29
webcut volume 1 with plane normal to curve 35 close_to vertex 32
webcut volume 5 with sheet extended from surface 16
webcut volume 6 with sheet extended from surface 51
webcut volume 5 6 7 with plane normal to curve 43 close_to vertex 40
webcut volume 5 6 7 8 9 10 with plane normal to curve 163 fraction .5 from start ## Cleanup small curves
collapse curve 124 vertex 83 real_split
collapse curve 136 vertex 95 real_split## Enforce contiguous mesh
imprint all
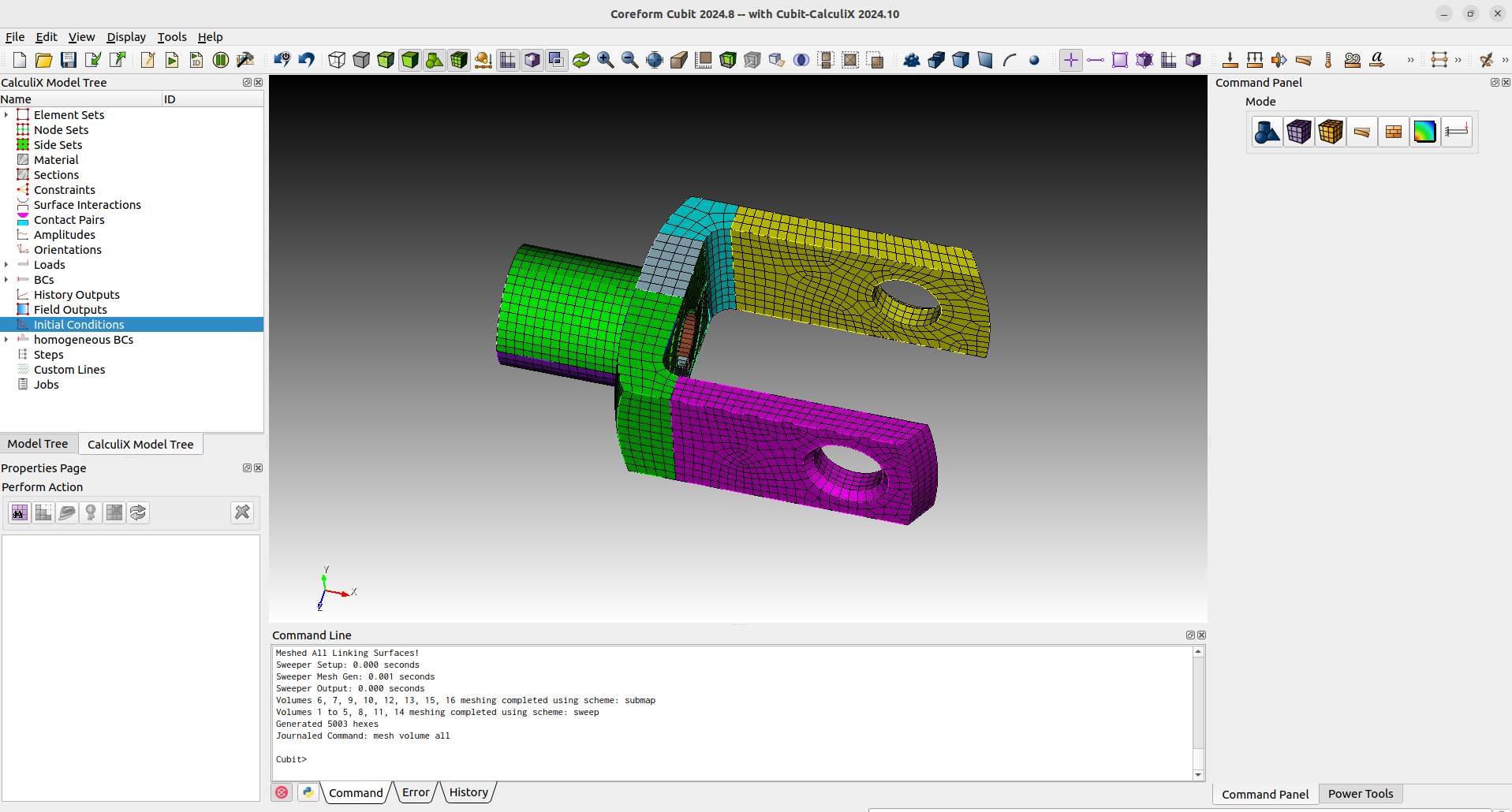
merge all## Generate Mesh
surface 104 112 138 142 44 48 scheme polyhedron
mesh surface 104 112 138 142 44 48volume 1 2 3 4 8 5 11 14 redistribute nodes off
volume 1 2 3 4 8 5 11 14 autosmooth target on fixed imprints off smart smooth off
volume 1 scheme Sweep source surface 48 target surface 47 sweep transform least squares
volume 4 scheme Sweep source surface 44 target surface 45 sweep transform least squares
volume 8 scheme Sweep source surface 138 target surface 136 sweep transform least squares
volume 5 scheme Sweep source surface 104 target surface 106 sweep transform least squares
volume 11 scheme Sweep source surface 112 target surface 110 sweep transform least squares
volume 14 scheme Sweep source surface 142 target surface 144 sweep transform least squares
volume 3 scheme Sweep source surface 36 3 target surface 6 sweep transform least squares
volume 2 scheme Sweep source surface 33 7 target surface 9 sweep transform least squares mesh volume all
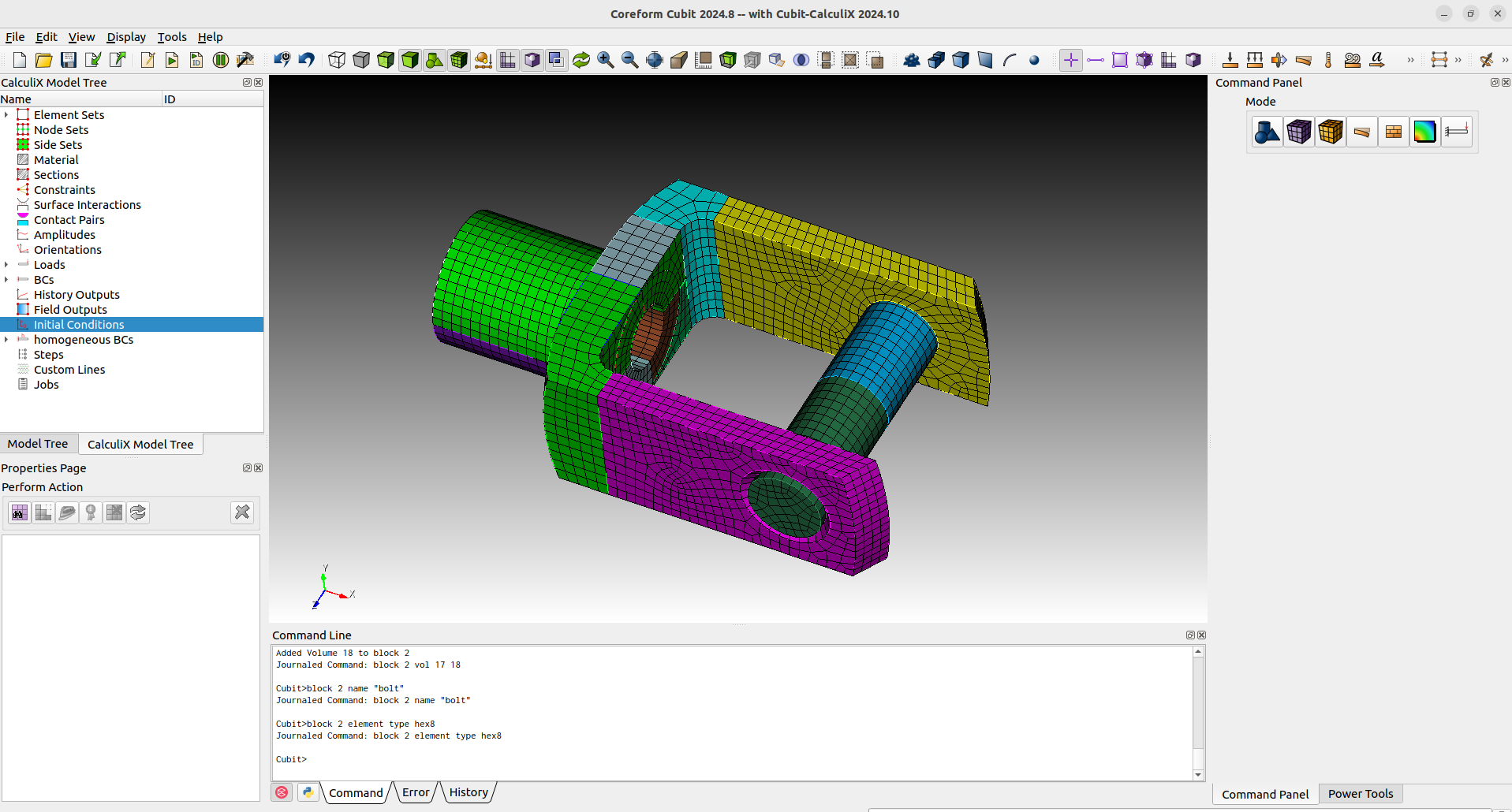
Now we can start with adding a bolt. We will first create a cylinder and cut him in the middle. This way we can get a surface for a rigid body constraint. After the cut we merge the cylinder volumes and move them to holes from the knuckle. Then we will mesh the bolt and assign the block and element type.
create Cylinder height 36 radius 5
webcut volume 17 with plane zplane offset 0
merge vol 17 18
move Surface 174 location vertex 33 except x y include_merged
move Surface 175 location surface 2 except z include_mergedmesh vol 17 18block 2 vol 17 18
block 2 name "bolt"
block 2 element type hex8
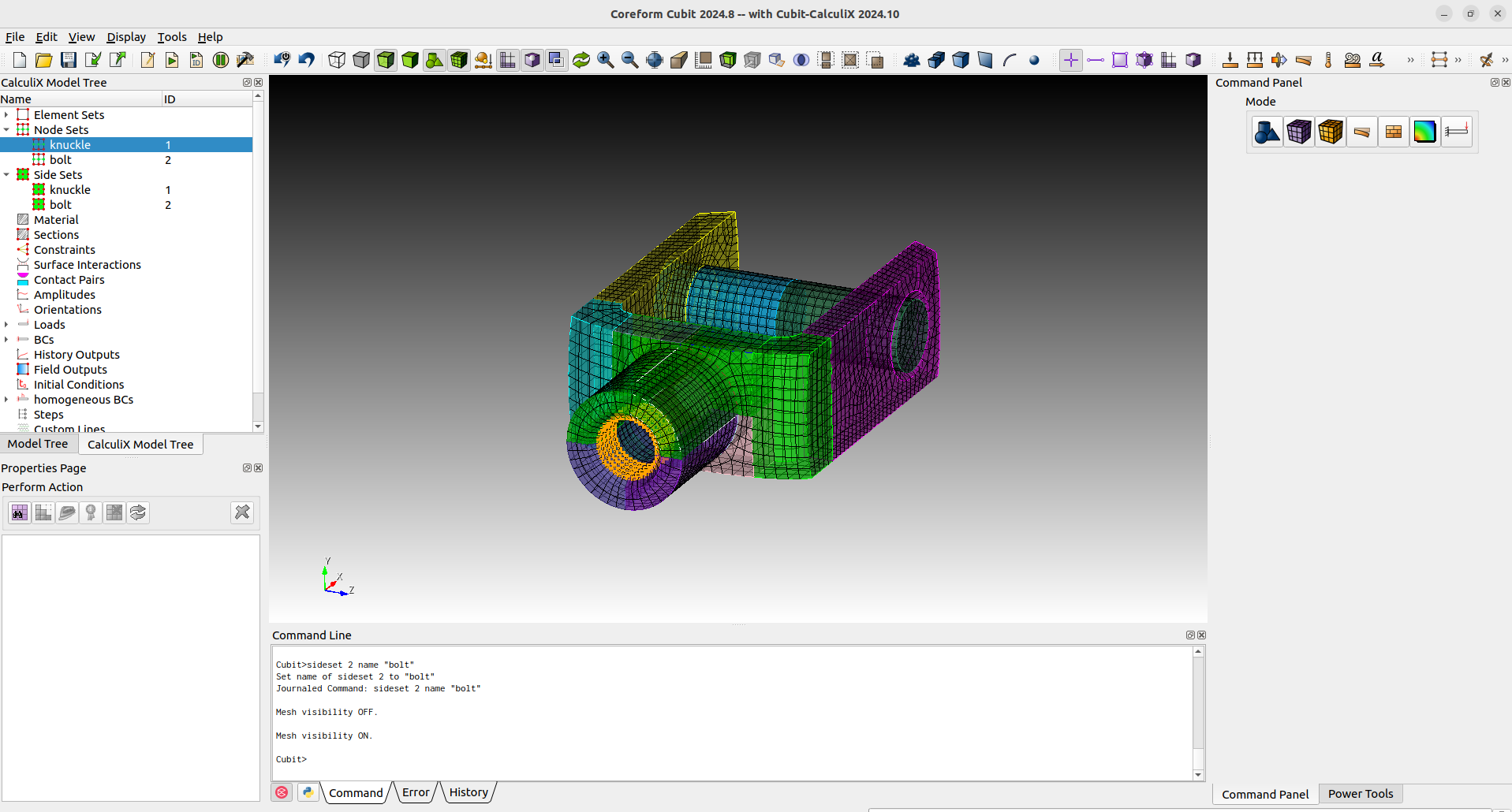
Next we can already create the nodesets and sidesets that will be used for our boundary conditions, constraints and contact definitions.
nodeset 1 add node all in surface 115 123 149 152 with x_coord < -18
nodeset 1 name "knuckle"
nodeset 2 add surface 174
nodeset 2 name "bolt"#sidesets
sideset 1 add surface 2 8
sideset 1 name "knuckle"
sideset 2 add surface 177 175
sideset 2 name "bolt"
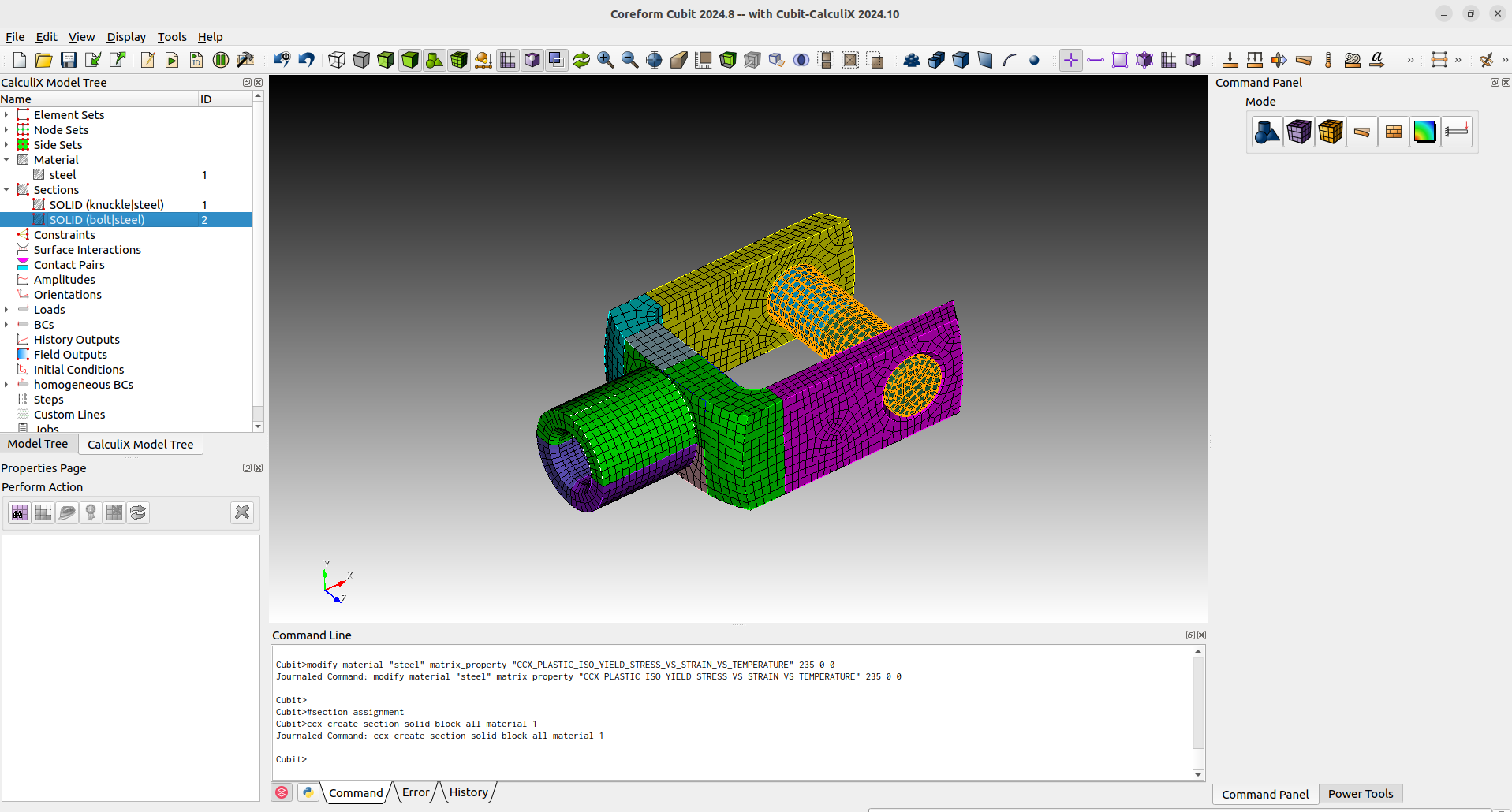
We define the Material and assign it to the Sections.
create material "steel" property_group "CalculiX-FEA"
modify material "steel" scalar_properties "CCX_ELASTIC_USE_CARD" 1
modify material "steel" scalar_properties "CCX_ELASTIC_ISO_USE_CARD" 1
modify material "steel" matrix_property "CCX_ELASTIC_ISO_MODULUS_VS_POISSON_VS_TEMPERATURE" 210000 0.3 0
modify material "steel" scalar_properties "CCX_PLASTIC_ISO_USE_CARD" 1
modify material "steel" scalar_properties "CCX_EXPANSION_ISO_USE_CARD" 1
modify material "steel" scalar_properties "CCX_CONDUCTIVITY_ISO_USE_CARD" 1
modify material "steel" scalar_properties "CCX_PLASTIC_USE_CARD" 1
modify material "steel" matrix_property "CCX_PLASTIC_ISO_YIELD_STRESS_VS_STRAIN_VS_TEMPERATURE" 235 0 0#section assignment
ccx create section solid block all material 1
Now we will define a rigid body constraint in the middle of the bolt and also the contact between the bolt and the knuckle.
create vertex location center curve 265
create vertex location center curve 265
create vertex location on surface 174 center
create vertex location on surface 174 center
mesh vertex all#constraints
ccx create constraint rigid body nodeset 1 ref 181 rot 182
ccx create constraint rigid body nodeset 2 ref 183 rot 184#surface interaction
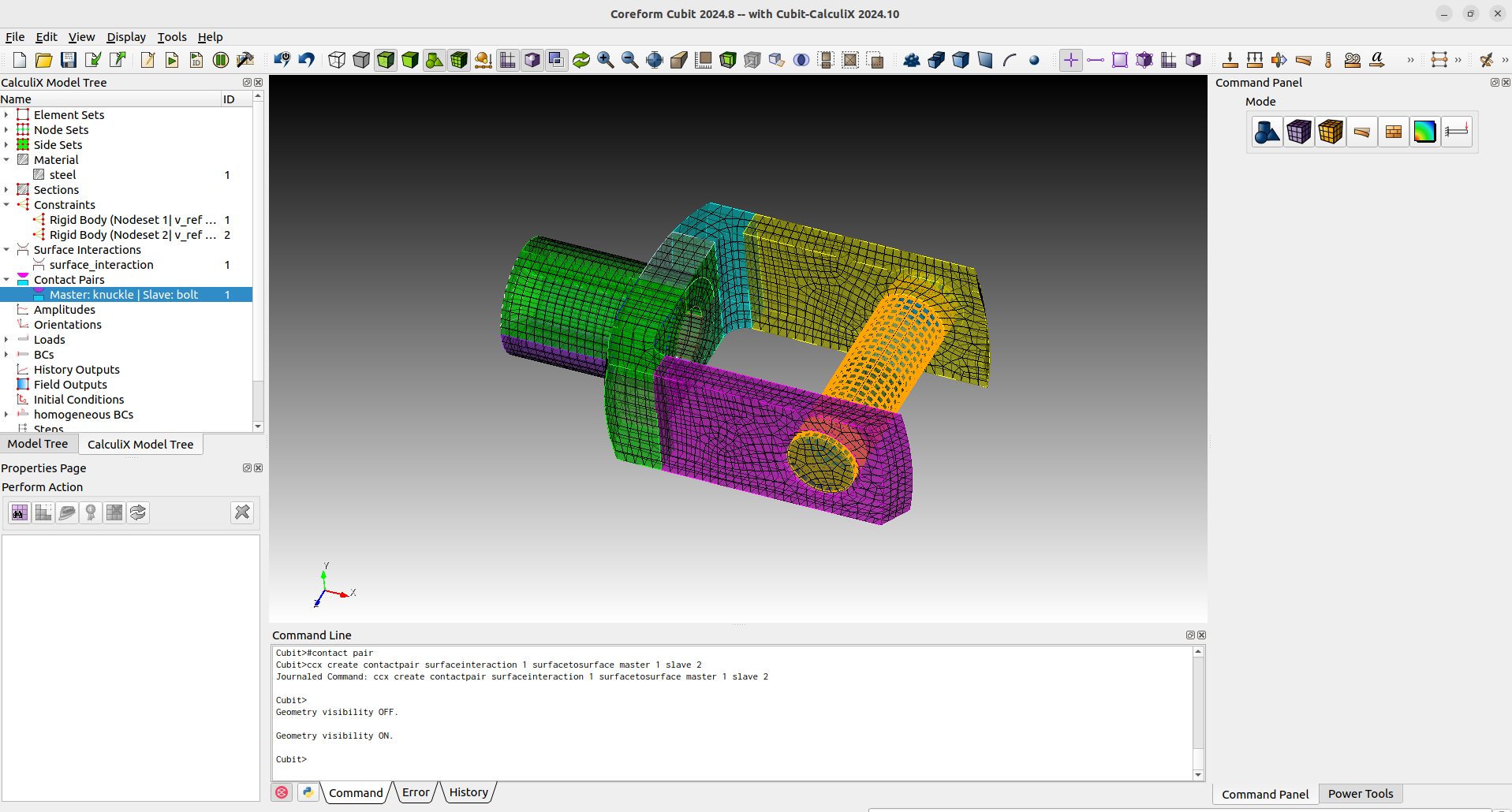
ccx create surfaceinteraction name "surface_interaction" linear slopeK 1e+7 sigmaINF 1 c0 1e-3#contact pair
ccx create contactpair surfaceinteraction 1 surfacetosurface master 1 slave 2
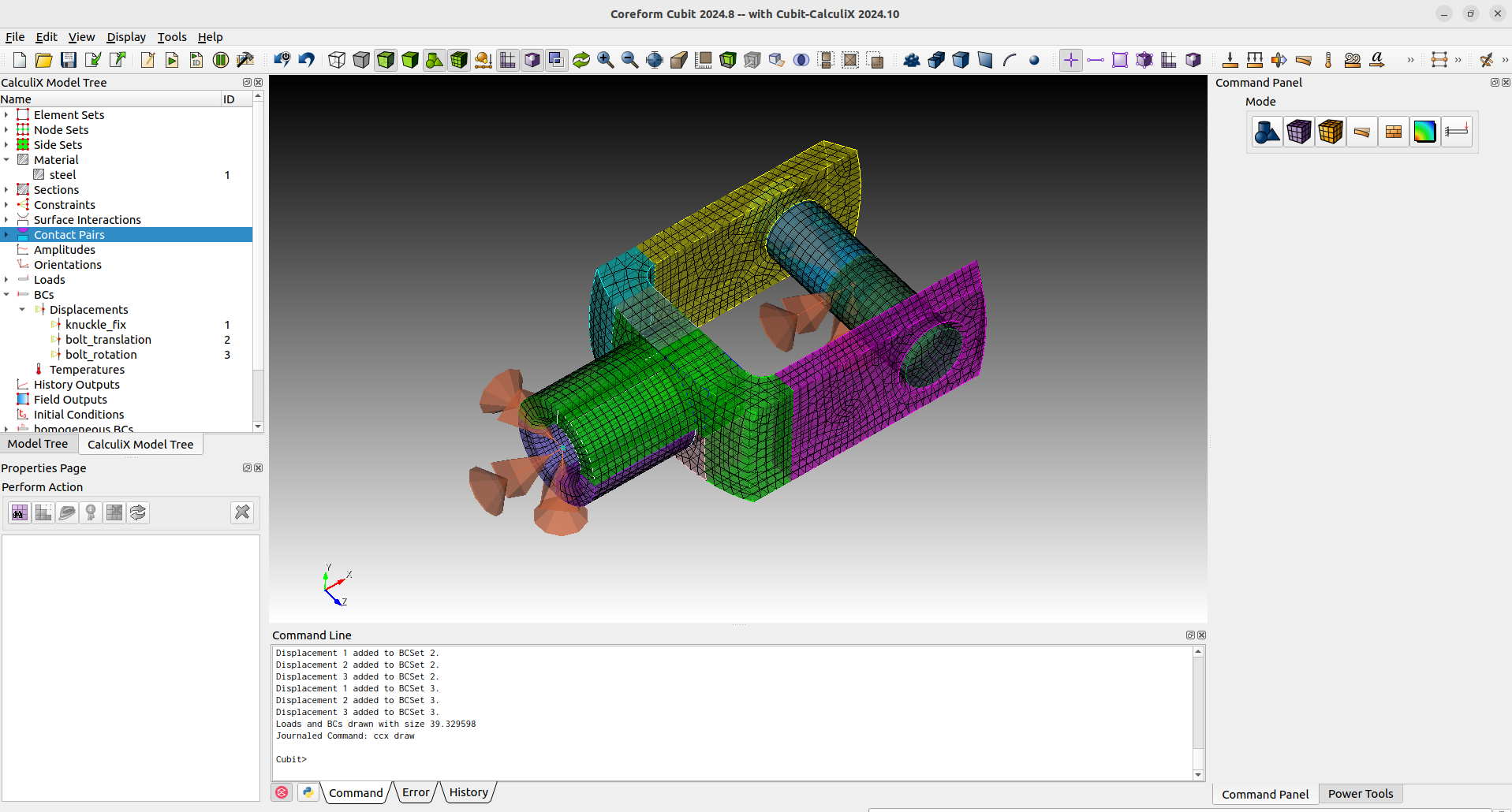
As boundary conditions we will set the displacements from the knuckle nodeset to zero. The reference point for the bolt will get a displacement set for moving in the x-direction and all other dofs are set to zero. Note that with "ccx draw" the calculix boundary conditions can be drawn in cubit.
create displacement name "knuckle_fix" on vertex 181 182 dof all fix 0
create displacement name "bolt_translation" on vertex 183 dof all fix 0
modify displacement 2 dof 1 fix 2
create displacement name "bolt_rotation" on vertex 184 dof all fix 0
ccx create historyoutput name "ho_knuckle" node
ccx modify historyoutput 1 node nodeset 3
ccx modify historyoutput 1 node key_on u rf
ccx modify historyoutput 1 node key_off nt tsf ttf pn psf ptf mach cp vf depf turb mf rfl
ccx create historyoutput name "ho_bolt_translation" node
ccx modify historyoutput 2 node nodeset 4
ccx modify historyoutput 2 node key_on u rf
ccx modify historyoutput 2 node key_off nt tsf ttf pn psf ptf mach cp vf depf turb mf rfl
ccx create historyoutput name "ho_bolt_rotation" node
ccx modify historyoutput 3 node nodeset 5
ccx modify historyoutput 3 node key_on u rf
ccx modify historyoutput 3 node key_off nt tsf ttf pn psf ptf mach cp vf depf turb mf rflccx create fieldoutput name "fo_node" node
ccx modify fieldoutput 1 node key_on rf u
ccx modify fieldoutput 1 node key_off cp depf dept dtf hcri keq mach maxu mf nt pnt pot prf ps psf pt ptf pu rfl sen ts tsf tt ttf turb v vf
ccx create fieldoutput name "fo_element" element
ccx modify fieldoutput 2 element key_on e s
ccx modify fieldoutput 2 element key_off ceeq ecd emfb emfe ener err her hfl hflf maxe maxs me peeq phs sf smid sneg spos svf sdv the zzs
ccx create fieldoutput name "fo_contact" contact
ccx modify fieldoutput 3 contact contact_elements_on
ccx modify fieldoutput 3 contact key_on cdis cstr cels pcon
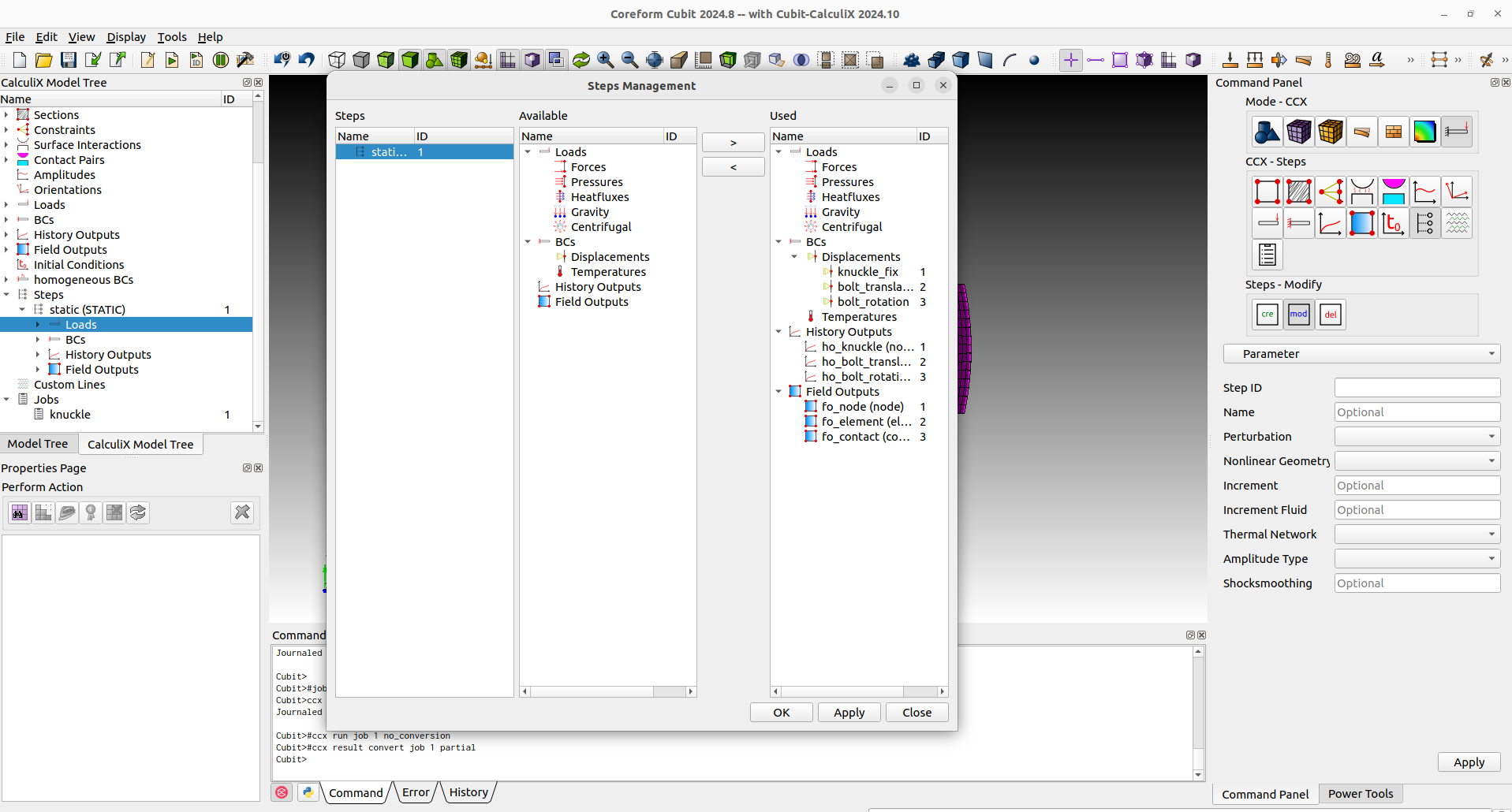
ccx create step name "static" static
ccx modify step 1 parameter nlgeom_yes inc 10000
ccx modify step 1 static totaltimeatstart 0 initialtimeincrement 0.02 timeperiodofstep 1 minimumtimeincrement 1e-06 maximumtimeincrement 0.02
ccx step 1 add bc displacement 1 2 3
ccx step 1 add historyoutput 1 2 3
ccx step 1 add fieldoutput 1 2 3#job
ccx create job name "knuckle"ccx run job 1
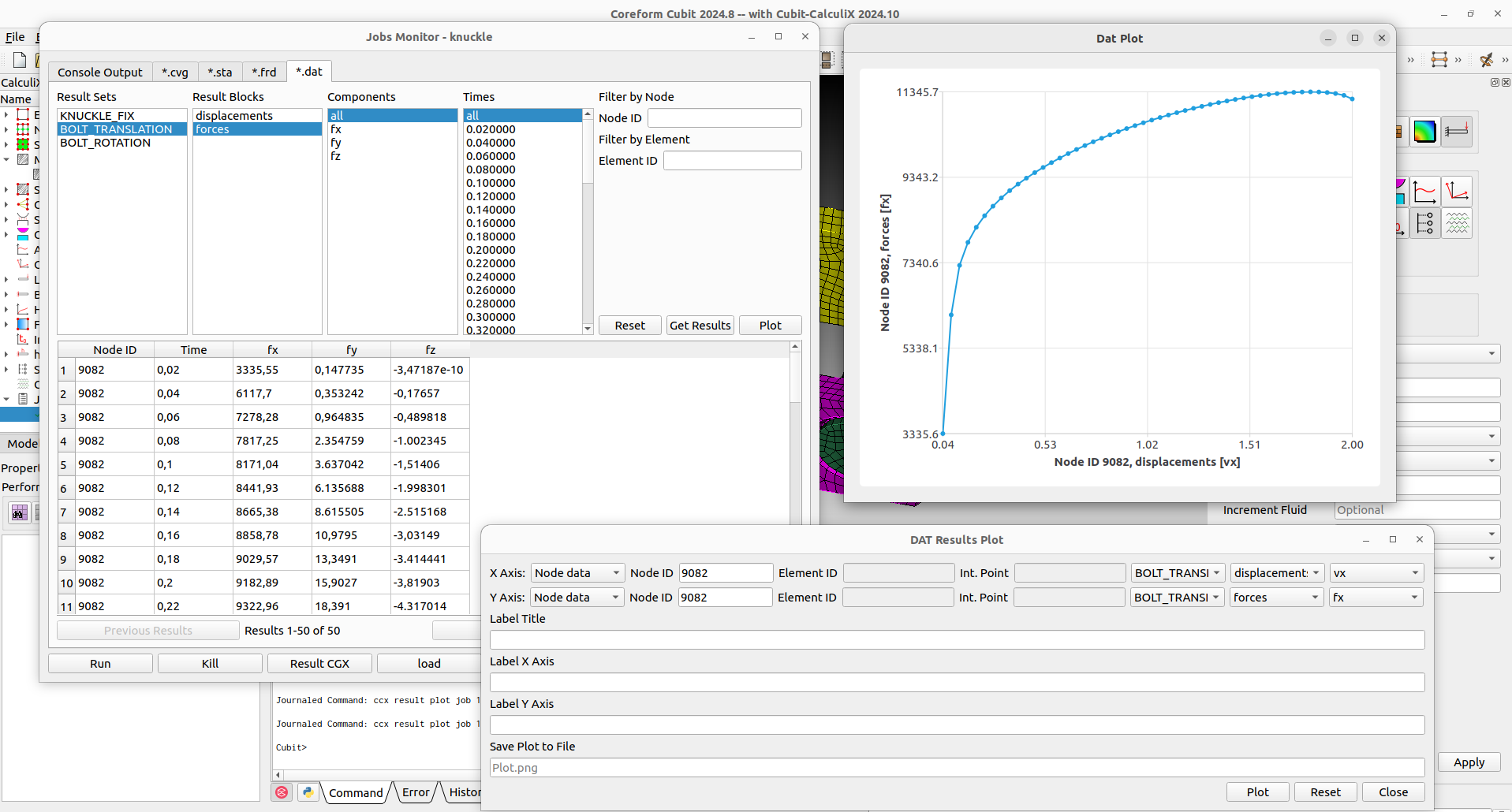
When the results are loaded into cubit we can already peak into the results using the .frd and .dat tabs in the job monitor. For example we can plot the force from the reference point of the bolt over its displacements.
The results can be opened with paraview for the postprocessing. As we convert the results into partitioned datasets, viewing single parts or sets is also possible.
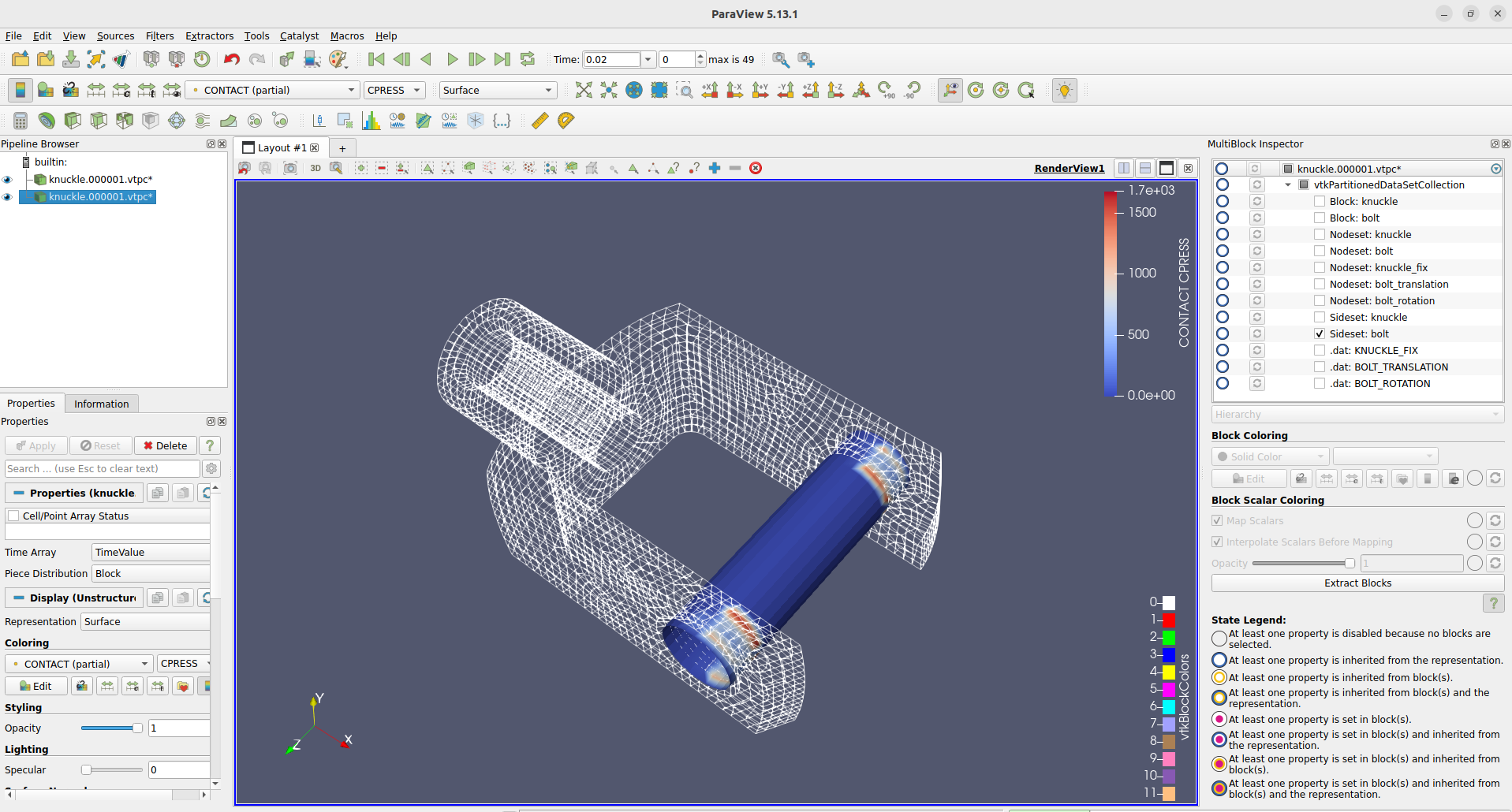
Also note that with the 2024.10 update of Cubit-CalculiX you can now save the whole model with the standard .cub5 from cubit. Everytime you save or load such files. The component will save and try to load data from the .cub5 . The loaded .frd and .dat results can be stored too in this file. So if you store the results with the whole model you just need to hit the convert button again to create the paraview files.

